재밌게도, (ssh login 후) 아래 명령을 실행할 경우, 앞서 WebUI에 표시되었던 sensor 정보 값 등을 뽑아낼 수가 있다.
root@GL-S200:~# /usr/bin/demo_get_sensor_data
1 dev_id=9483c4624605dbe8 connected=0 temperature=23.655776 humidity=46.076965 brightness=93 pressure=101.217536
[그림 2.11] GL-S200 router에서 TDB 센서 정보 출력
📌 Border Router에서 외부 서버(예: Cloud 서버)로 sensor 정보를 전달하고자 할 때 활용하면 좋을 듯 하다.
끝으로, TDB 장치의 동작 내용은 serial console을 통해 확인 가능하다.
$ sudo minicom -D /dev/ttyUSB1 -b 460800
[그림 2.12] GL Thread Dev Board Console 출력 모습
📌 Baudrate이 460800으로 다소 특이하다.
이상으로 GL-S200 router와 TDB thread 장치를 간략히 살펴 보고, 둘 간을 Thread protocol을 이용하여 연결시켜 보았다. 다음 장에서는 TDB 장치의 firmware를 직접 build하고 설치(기존 내용 교체)하는 과정을 소개해 보도록 하자. 🔧
3. Thread Dev Board 용 Firmware 만들기
이번 장에서는 Thread Dev Board용 firmware를 새로 build해서 올리는 방법을 소개하고자 한다.
TDB의 MCU인 NRF52840 SoC은 ARM Cortex-M4, 1MB flash, 256KB RAM, BLE, Thread, ZigBee 및 다양한 주변장치 controller(UART, i2c, spi ..)등으로 구성되어 있다.
한편, TDB가 Zephyr project를 기반으로 되어 있는 만큼, 관련 내용을 사전에 확인해 볼 필요가 있겠다.
3.1 TDB firmware build 하기
아래 github에 올라가 있는 source code를 살펴 보니, (앞서에 언급한 바와 같이)재밌게도 Zephyr project를 기반으로 하고 있다.
Zephyr project에 관해서는 좀 오래되기는 했어도, (다음 단계로 넘어가기에 앞서) 필자가 작성한 이전 글을 참조해 보는 것도 좋을 듯 싶다. 😙
<TDB firmware build 하기>
$ cd zephyrproject/
chyi@earth:~$ west init -m https://github.com/gl-inet/gl-nrf-sdk --mr v2.2.0-glinet gl-nrf-sdk
=== Initializing in /home/chyi/gl-nrf-sdk
--- Cloning manifest repository from https://github.com/gl-inet/gl-nrf-sdk, rev. v2.2.0-glinet
'/home/chyi/gl-nrf-sdk/.west/manifest-tmp'에 복제합니다...
remote: Enumerating objects: 203945, done.
remote: Total 203945 (delta 0), reused 0 (delta 0), pack-reused 203945 (from 1)
오브젝트를 받는 중: 100% (203945/203945), 135.86 MiB | 1.09 MiB/s, 완료.
델타를 알아내는 중: 100% (152502/152502), 완료.
--- setting manifest.path to nrf
=== Initialized. Now run "west update" inside /home/chyi/gl-nrf-sdk.
$ cd gl-nrf-sdk/
$ west update
$ cd glinet/gl-dev-board-over-thread
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread$ ls -la
합계 92
drwxrwxr-x 12 chyi chyi 4096 10월 28 16:32 .
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 ..
drwxrwxr-x 8 chyi chyi 4096 10월 26 18:29 .git
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 .github
-rwxrwxr-x 1 chyi chyi 13 10월 26 18:21 .gitignore
-rwxrwxr-x 1 chyi chyi 2278 10월 26 18:21 CMakeLists.txt
-rwxrwxr-x 1 chyi chyi 1205 10월 26 18:21 Kconfig
-rwxrwxr-x 1 chyi chyi 11357 10월 26 18:21 LICENSE
-rwxrwxr-x 1 chyi chyi 11174 10월 26 18:21 README.md
drwxrwxr-x 2 chyi chyi 4096 10월 26 18:21 boards
drwxrwxr-x 8 chyi chyi 4096 10월 26 18:34 build
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 docs
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 drivers
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 dts
-rw-rw-r-- 1 chyi chyi 1983 10월 26 18:21 guide_to_use.md
drwxrwxr-x 2 chyi chyi 4096 10월 26 18:21 hardware_files
-rwxrwxr-x 1 chyi chyi 2673 10월 26 18:21 prj.conf
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 src
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 uart_dfu
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread$ west build -b gl_nrf52840_dev_board
📌 zephyr project에서는 west로 build를 한다. -p always option을 주면 pristine(초기 상태로 clean) build를 하게 해 준다.
...
[657/675] Linking CXX executable zephyr/zephyr_pre0.elf
[661/675] Linking CXX executable zephyr/zephyr_pre1.elf
[667/675] Linking CXX executable zephyr/zephyr.elf
Memory region Used Size Region Size %age Used
FLASH: 440916 B 495104 B 89.06%
RAM: 115768 B 256 KB 44.16%
IDT_LIST: 0 GB 2 KB 0.00%
[670/675] Generating ../../zephyr/app_update.bin #아무래도 update시에는 이 파일을 사용하는 것 같다.
sign the payload
[672/675] Generating ../../zephyr/app_signed.hex
sign the payload
[673/675] Generating ../../zephyr/app_test_update.hex
sign the payload
[675/675] Generating zephyr/merged.hex #얘는 jtag/swd 연결 후 사용하는 통합 image로 보임.
OK, 성공적으로 build가 되었으니, 이제 부터는 flash writing을 시도해 보도록 하자.
TDB firmware 설치 방법 3가지
- 1) JTAG or SWD(Serial Wire Debug) adapter를 이용하는 방법
- 2) DFU over Serial 방법(ROM code에서 설치 모드 진입 후 진행)
- 3) DFU over IP 방법(WebUI에서 network으로 설치하는 방법)
이 중 처음 2가지 방법을 시도해보도록 하겠다.
<1. SWD debugger를 이용한 방법>
원래대로라면, 정품 J-link adapter를 이용하여 flash writing을 시도하는 것이 답이겠지만, 개인적으로 (값비싼) J-link adapter를 보유하지 못한 관계로, 아래와 같이 SWD 호환 debugger(디바이스 마트에서 5000원에 구매 😝)를 이용해 보기로 한다.
[그림 3.3] J-Link OB(On Board) V8 micro USB ARM용 SWD 호환 디버거 [SZH-EK205] [출처 - 참고문헌 12]
먼저, 아래와 같은 구성으로 pin 연결을 한 후, USB cable을 PC(notebook)에 연결한다.
[그림 3.4] J-Link OB V8 micro USB ARM용 SWD 호환 디버거 연결 개요도
<TDB> <SWD debugger>
VCC(3.3V) --------- VCC
GND --------- GND
SWDIO --------- SWDIO
SWDCLK --------- SWDCLK
[그림 3.5] J-Link OB V8 micro USB ARM용 SWD 호환 디버거 연결 모습
다음으로, dmesg 명령으로 SWD debugger가 USB 장치로 제대로 인식되는지 확인한다.
$ sudo dmesg
[ 1396.261536] usb 1-9: new full-speed USB device number 8 using xhci_hcd
[ 1396.388703] usb 1-9: New USB device found, idVendor=1a86, idProduct=7523, bcdDevice=81.34
[ 1396.388713] usb 1-9: New USB device strings: Mfr=0, Product=2, SerialNumber=0
[ 1396.388717] usb 1-9: Product: USB Serial
[ 1396.391179] ch341 1-9:1.0: ch341-uart converter detected
[ 1396.391715] usb 1-9: ch341-uart converter now attached to ttyUSB1
[ 8708.931035] usb 1-9: USB disconnect, device number 8
[ 8708.931388] ch341-uart ttyUSB1: ch341-uart converter now disconnected from ttyUSB1
[ 8708.931419] ch341 1-9:1.0: device disconnected
[ 9267.124593] usb 1-7.1: new full-speed USB device number 9 using xhci_hcd
[ 9267.203694] usb 1-7.1: New USB device found, idVendor=1366, idProduct=0101, bcdDevice= 1.00
[ 9267.203706] usb 1-7.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 9267.203710] usb 1-7.1: Product: J-Link
[ 9267.203713] usb 1-7.1: Manufacturer: SEGGER
[ 9267.203716] usb 1-7.1: SerialNumber: 000000123456
그 다음, 아래 site에서
nrfjprog tool을 내려 받아 설치하도록 한다(
west flash 명령을 시도해 보면, nrfjprog가 없다고 나옴).
$ sudo dpkg -i ./nrf-command-line-tools_10.24.2_amd64.deb
$ sudo apt install /opt/nrf-command-line-tools/share/JLink_Linux_V794e_x86_64.deb --fix-broken
📌 nrfjprog은 SEGGER J-Link programmer & debugger를 사용하여 노르딕 SoC에 flash writing(or debugging)을 할 때 사용하는 명령 도구이다. Openocd와 유사한 녀석으로 생각하면 될 듯하다.
자, 준비가 끝났으니, flash writing을 해 보자.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread$ west flash --erase
-- west flash: rebuilding
[0/5] Performing build step for 'mcuboot_subimage'
ninja: no work to do.
[2/2] cd /home/chyi/gl-nrf-sdk/glinet/gl-dev-boar...-sdk/modules/lib/openthread/etc/cmake/print.cmake
OPENTHREAD_CONFIG_ASSERT_ENABLE=0
OPENTHREAD_CONFIG_BACKBONE_ROUTER_ENABLE=0
OPENTHREAD_CONFIG_BORDER_AGENT_ENABLE=0
OPENTHREAD_CONFIG_BORDER_ROUTER_ENABLE=0
OPENTHREAD_CONFIG_CHANNEL_MANAGER_ENABLE=0
OPENTHREAD_CONFIG_CHANNEL_MONITOR_ENABLE=0
OPENTHREAD_CONFIG_CHILD_SUPERVISION_ENABLE=0
OPENTHREAD_CONFIG_COAP_API_ENABLE=1
OPENTHREAD_CONFIG_COAP_BLOCKWISE_TRANSFER_ENABLE=0
OPENTHREAD_CONFIG_COAP_OBSERVE_API_ENABLE=0
OPENTHREAD_CONFIG_COAP_SECURE_API_ENABLE=0
OPENTHREAD_CONFIG_COMMISSIONER_ENABLE=0
OPENTHREAD_CONFIG_MAC_CSL_AUTO_SYNC_ENABLE=0
OPENTHREAD_CONFIG_MAC_CSL_DEBUG_ENABLE=0
OPENTHREAD_CONFIG_MAC_CSL_RECEIVER_ENABLE=0
OPENTHREAD_CONFIG_DATASET_UPDATER_ENABLE=0
OPENTHREAD_CONFIG_DHCP6_CLIENT_ENABLE=0
OPENTHREAD_CONFIG_DHCP6_SERVER_ENABLE=0
OPENTHREAD_CONFIG_DIAG_ENABLE=0
OPENTHREAD_CONFIG_DNS_CLIENT_ENABLE=0
OPENTHREAD_CONFIG_DNS_DSO_ENABLE=0
OPENTHREAD_CONFIG_DNSSD_SERVER_ENABLE=0
OPENTHREAD_CONFIG_DUA_ENABLE=0
OPENTHREAD_CONFIG_ECDSA_ENABLE=1
OPENTHREAD_CONFIG_HEAP_EXTERNAL_ENABLE=0
OPENTHREAD_CONFIG_HISTORY_TRACKER_ENABLE=0
OPENTHREAD_CONFIG_IP6_FRAGMENTATION_ENABLE=0
OPENTHREAD_CONFIG_JAM_DETECTION_ENABLE=0
OPENTHREAD_CONFIG_JOINER_ENABLE=1
OPENTHREAD_CONFIG_LEGACY_ENABLE=1
OPENTHREAD_CONFIG_MLE_LINK_METRICS_INITIATOR_ENABLE=0
OPENTHREAD_CONFIG_MLE_LINK_METRICS_SUBJECT_ENABLE=0
OPENTHREAD_CONFIG_LINK_RAW_ENABLE=0
OPENTHREAD_CONFIG_LOG_LEVEL_DYNAMIC_ENABLE=0
OPENTHREAD_CONFIG_MAC_FILTER_ENABLE=0
OPENTHREAD_CONFIG_MLE_LONG_ROUTES_ENABLE=0
OPENTHREAD_CONFIG_MLR_ENABLE=0
OPENTHREAD_CONFIG_TMF_NETWORK_DIAG_MTD_ENABLE=0
OPENTHREAD_CONFIG_MULTIPLE_INSTANCE_ENABLE=0
OPENTHREAD_CONFIG_NEIGHBOR_DISCOVERY_AGENT_ENABLE=0
OPENTHREAD_CONFIG_NETDATA_PUBLISHER_ENABLE=0
OPENTHREAD_CONFIG_OTNS_ENABLE=0
OPENTHREAD_CONFIG_PING_SENDER_ENABLE=1
OPENTHREAD_CONFIG_PLATFORM_NETIF_ENABLE=0
OPENTHREAD_CONFIG_PLATFORM_UDP_ENABLE=0
OPENTHREAD_CONFIG_REFERENCE_DEVICE_ENABLE=0
OPENTHREAD_CONFIG_TMF_NETDATA_SERVICE_ENABLE=0
OPENTHREAD_SETTINGS_RAM=0
OPENTHREAD_CONFIG_IP6_SLAAC_ENABLE=1
OPENTHREAD_CONFIG_SNTP_CLIENT_ENABLE=0
OPENTHREAD_CONFIG_SRP_CLIENT_ENABLE=1
OPENTHREAD_CONFIG_SRP_SERVER_ENABLE=0
OPENTHREAD_CONFIG_TIME_SYNC_ENABLE=0
OPENTHREAD_CONFIG_RADIO_LINK_TREL_ENABLE=0
OPENTHREAD_CONFIG_UDP_FORWARD_ENABLE=0
OPENTHREAD_CONFIG_UPTIME_ENABLE=0
OPENTHREAD_SPINEL_CONFIG_RCP_RESTORATION_MAX_COUNT=0
OPENTHREAD_CONFIG_ENABLE_BUILTIN_MBEDTLS=0
OPENTHREAD_CONFIG_ENABLE_BUILTIN_MBEDTLS_MANAGEMENT=0
PACKAGE_NAME=OPENTHREAD
OPENTHREAD_CONFIG_THREAD_VERSION=OT_THREAD_VERSION_1_3
OPENTHREAD_CONFIG_NCP_HDLC_ENABLE=1
KERNEL
__ZEPHYR__=1
_FORTIFY_SOURCE=1
_ANSI_SOURCE
__LINUX_ERRNO_EXTENSIONS__
USE_PARTITION_MANAGER=1
__PROGRAM_START
NRF52840_XXAA
NRF_802154_CCA_CORR_LIMIT_DEFAULT=2
NRF_802154_CCA_CORR_THRESHOLD_DEFAULT=45
NRF_802154_CCA_ED_THRESHOLD_DEFAULT=45
NRF_802154_CCA_MODE_DEFAULT=NRF_RADIO_CCA_MODE_ED
NRF_802154_USE_RAW_API=1
NRF_802154_PENDING_SHORT_ADDRESSES=16
NRF_802154_PENDING_EXTENDED_ADDRESSES=16
NRF_802154_RX_BUFFERS=16
NRF_802154_TX_STARTED_NOTIFY_ENABLED=1
NRF_802154_ACK_TIMEOUT_ENABLED=1
NRF_802154_ENCRYPTION_ENABLED=1
NRF_802154_SECURITY_WRITER_ENABLED=1
NRF_802154_IE_WRITER_ENABLED=1
NRF_802154_INTERNAL_RADIO_IRQ_HANDLING=0
NRF_802154_ECB_PRIORITY=-1
NRF_802154_SWI_PRIORITY=1
MBEDTLS_CONFIG_FILE=nrf-config.h
MBEDTLS_USER_CONFIG_FILE=nrf-config-user.h
-- west flash: using runner nrfjprog
-- runners.nrfjprog: mass erase requested
Using board 123456
-- runners.nrfjprog: Flashing file: /home/chyi/gl-nrf-sdk/glinet/gl-dev-board-over-thread/build/zephyr/merged.hex
ERROR: Serial number of connected device (20090928) does not match the expected serial number 123456.
ERROR: There is no debugger connected to the PC with the given serial number.
NOTE: For additional output, try running again with logging enabled (--log).
NOTE: Any generated log error messages will be displayed.
FATAL ERROR: command exited with status 40: nrfjprog --program /home/chyi/gl-nrf-sdk/glinet/gl-dev-board-over-thread/build/zephyr/merged.hex --chiperase --verify -f NRF52 --snr 123456
예상대로, 에러가 발생한다. (겁먹지 말고) 위의 마지막 명령에서 --snr 부분만 제거하고 실행해 본다.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread$ nrfjprog --program /home/chyi/gl-nrf-sdk/glinet/gl-dev-board-over-thread/build/zephyr/merged.hex --sectoranduicrerase --verify -f NRF52
OK, 정상적으로 설치가 되었다. 이후 minicom으로 확인해 보니 제대로 올라온다. 😎
📌 J-Link OB V8 micro USB ARM용 SWD 호환 디버거를 이용해서 거창한(?) debugging을 할 것이 아니라면, 가격대비 나쁘지 않은 선택인 듯 보인다.
<2. mcumgr tool로 firmware 올리기 - DFU over Serial 방법>
다음으로, Gl-iNet에서 제공하는
mcumgr이라는 DFU(Development Firmware Upgrade) 도구를 활용하기로 한다.
📌 DFU over serial 이라고 함은, 부팅 시 강제로 ROM code로 진입한 후, serial port(UART)를 통해 firmware를 download 받는 방식을 말한다.
먼저 현재 설치되어 있는 image 정보를 확인한다.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB1,baud=460800 image list
Images:
image=0 slot=0
version: 1.1.5
bootable: true
flags: active confirmed
hash: 4d8548e6910e7214d8325a7d1a49a8390fb25cce983bdb0b15bfecc657f7860b
Split status: N/A (0)
다음으로, github에 release되어 있는 firmware 파일(bin file)로 1차 설치 테스트를 진행해 본다.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 image upload /home/chyi/gl-nrf-sdk/glinet/mydownload/GL-Dev-Board-Thread-MTD-OTA-v1.1.11.bin
379.04 KiB / 379.04 KiB [==================================================] 100.00% 16.90 KiB/s 22s
Done
정상적으로 firmware writing이 진행되는 것을 확인하였으니, 이번에는 앞서 build해 두었던 app_update.bin 파일을 이용해서 flash writing을 다시 시도하도록 하자.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 image upload ../../../build/zephyr/app_update.bin
431.23 KiB / 431.23 KiB [======================================================] 100.00% 61.12 KiB/s 7s
Done
역시, 정상 설치가 된 듯 보이니, 이 상태에서 현재 설치되어 있는 image 정보를 확인해 보자.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 image list
Images:
image=0 slot=0
version: 1.1.5
bootable: true
flags: active confirmed
hash: 4d8548e6910e7214d8325a7d1a49a8390fb25cce983bdb0b15bfecc657f7860b
image=0 slot=1
version: 1.1.11
bootable: true
flags:
hash: dab4c5f561debfb3064da2277d72aa3fc89c15fe838f395b18c4479eca310de9
Split status: N/A (0)
확인 결과, 기존 것 외에 새로 설치된 것이 함께 보인다. 다음번 booting시, 새로 설치한 image가 반영되도록 하기 위해 hash 값을 입력해 준다.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 image test dab4c5f561debfb3064da2277d72aa3fc89c15fe838f395b18c4479eca310de9
Images:
image=0 slot=0
version: 1.1.5
bootable: true
flags: active confirmed
hash: 4d8548e6910e7214d8325a7d1a49a8390fb25cce983bdb0b15bfecc657f7860b
image=0 slot=1
version: 1.1.11
bootable: true
flags: pending
hash: dab4c5f561debfb3064da2277d72aa3fc89c15fe838f395b18c4479eca310de9
Split status: N/A (0)
자, 모든 것이 준비되었으니, Thread Dev Board를 reset 하도록 한다.
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 reset
Done
부팅 후, image list를 재 확인해 보니, 새로 설치한 버젼이 구동되었음을 알 수 있다. 😎
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread/uart_dfu/mcumgr/ubuntu22.04$ sudo ./mcumgr --conntype serial --connstring=/dev/ttyUSB2,baud=460800 image list
Images:
image=0 slot=0
version: 1.1.11
bootable: true
flags: active confirmed
hash: dab4c5f561debfb3064da2277d72aa3fc89c15fe838f395b18c4479eca310de9
image=0 slot=1
version: 1.1.5
bootable: true
flags:
hash: 4d8548e6910e7214d8325a7d1a49a8390fb25cce983bdb0b15bfecc657f7860b
Split status: N/A (0)
_____________________________________________________________
마지막으로, TDB를 pairing한 후, GL-S200 WebUI에서 확인해 보니 모두 정상적으로 동작되고 있다.
[그림 3.6] Firmware를 교체한 Thread Device Board(TDB2)를 GL-S200에 연결한 모습
3.2 TDB firmware source code 살펴 보기
<TBD> 코드를 살펴 보도록 하자. 💢
chyi@earth:~/gl-nrf-sdk/glinet/gl-dev-board-over-thread$ ls -la
합계 92
drwxrwxr-x 12 chyi chyi 4096 10월 28 16:33 .
drwxrwxr-x 4 chyi chyi 4096 10월 29 13:12 ..
drwxrwxr-x 8 chyi chyi 4096 10월 26 18:29 .git
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 .github
-rwxrwxr-x 1 chyi chyi 13 10월 26 18:21 .gitignore
-rwxrwxr-x 1 chyi chyi 2278 10월 26 18:21 CMakeLists.txt
-rwxrwxr-x 1 chyi chyi 1205 10월 26 18:21 Kconfig
-rwxrwxr-x 1 chyi chyi 11357 10월 26 18:21 LICENSE
-rwxrwxr-x 1 chyi chyi 11174 10월 26 18:21 README.md
drwxrwxr-x 2 chyi chyi 4096 10월 29 13:12 boards
drwxrwxr-x 8 chyi chyi 4096 10월 26 18:34 build
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 docs
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 drivers
drwxrwxr-x 3 chyi chyi 4096 10월 26 18:21 dts
-rw-rw-r-- 1 chyi chyi 1983 10월 26 18:21 guide_to_use.md
drwxrwxr-x 2 chyi chyi 4096 10월 26 18:21 hardware_files
-rwxrwxr-x 1 chyi chyi 2673 10월 26 18:21 prj.conf
drwxrwxr-x 3 chyi chyi 4096 10월 28 20:34 src
drwxrwxr-x 4 chyi chyi 4096 10월 26 18:21 uart_dfu
___________________________________________
TDB 관련 회로도를 찾을 수가 없으나, device tree 파일이 있으니, 이를 통해 간접적으로 나마, 주요 주변 장치의 연결 관계를 파악해 볼 수 있을 것이다.
gl-nrf-sdk/nrf/boards/arm/gl_nrf52840_dev_board/gl_nrf52840_dev_board.dts
[그림 3.7] gl_nrf52840_dev_board.dts gpio led 관련
[그림 3.8] gl_nrf52840_dev_board.dts button 관련
[그림 3.9] gl_nrf52840_dev_board.dts i2c 연결 관련
📌 shtcx는 온습도 센서, hx3203은 조도 센서, spl0601은 압력 센서이다. 특이하게도 3개의 센서 모두 i2c0 controller에 연결되어 있다.
___________________________________________
지금까지 Thread Dev Board에 zephyr로 구현된 firmware를 올리는 과정을 정리해 보았다. (커피 한잔 마신 후)이어지는 장에서는 또 다른 Thread Border Router인 GL-S20을 살펴 보도록 하자. ☕
4. 또 다른 Thread Border Router GL-S20
이 장에서는 또 다른 Thread Border Router(Compact Thread Border Router for IoT)인 GL-S20 model을 (빠른 속도로) 소개하고자 한다. GL-S20에는 ESP32 chip이 장착되어 있고, OS도 Linux가 아니라 FreeRTOS가 올라가 있다.
[그림 4.1] Thread Device Board + GL-S20 + GL-S200
ESP32 및 FreeRTOS와 관련해서는 필자의 이전 글을 참조해 볼 것을 권한다. 😃
4.1 GL-S20 Router Overview
GL-S20 router의 대략적인 개요는 몇장의 그림으로 충분할 듯 하다(외관이 이쁘장하게 생겼다 😍).
[그림 4.3] GL-S20 Thread Border Router(2)
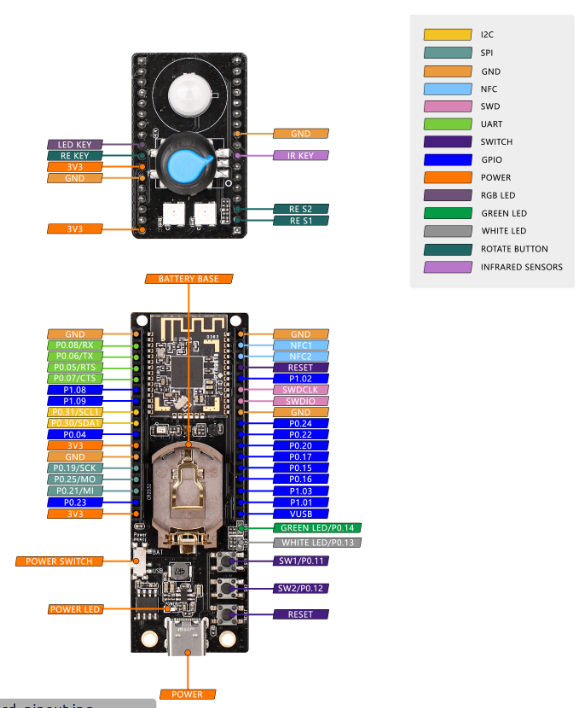
[그림 4.5] GL-S20 Board pinout [출처 - 참고문헌 7]
[그림 4.6] GL-S20 Thread Border Router를 이용한 Network 구성
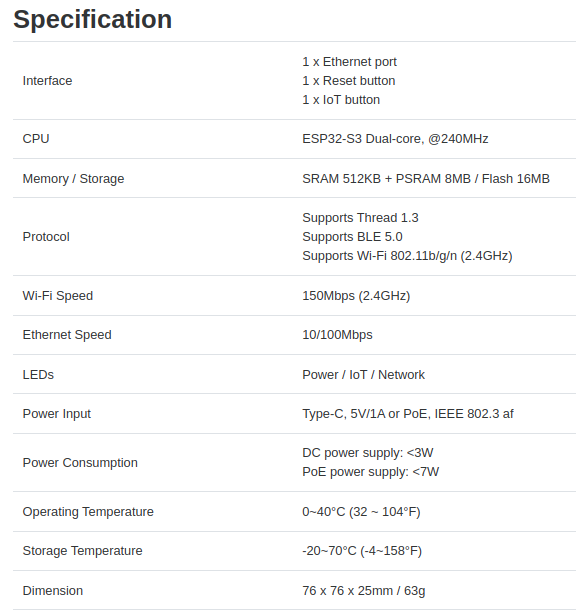
[그림 4.7] GL-S20 H/W Spec.
📌 GL-S20은 MCU로 ESP32-S3(CPU: Dual-core Xtensa® LX7 @ 240MHz)을 사용하며, OS로는 FreeRTOS를 사용한다.
4.2 GL-S20 Router 연결하기
GL-S20을 시험하기 위한 네트워크 구성은 다음과 같다.
<Testbed 구성>
Internet
^
|
GL-MT1300 Router (LAN: 192.168.8.1, WAN: 172.30.x.x)
^
|
GL-S200 (LAN: 192.168.7.1, WAN: 192.168.8.179), port forward(8080 -> 80)
^
|
GL-S20 (WAN: 192.168.7.175)
^
|
Thread Dev Boards
GL-S20도 (간단한 기능만 제공하기는 하지만) webui를 제공한다. 하지만 ssh는 당연히 안된다.
[그림 4.8] GL-S20 WebUI(1) - 인터넷 연결 화면
[그림 4.9] GL-S20 WebUI(2) - Thread Network 화면
4.3 GL-S20 firmware build 하기
GL-S20 firmware는 Espressif 사의 ESP-IDF를 기초로 하고 있다. 지금부터는 아래 3개의 site 내용을 참조하여 GL-S20용 firmware image를 만드는 과정을 소개해 보고자 한다.
📌 보다 보니, 위의 link(3)에 자세한 설명이 나와 있다.
[그림 4.10] ESP32 Thread Border Router Architecture
(Espressif에서 제조한) ESP Thread Border Router는 아래와 같이 2개의 SoC로 구성되어 있다.
The host Wi-Fi SoC, which can be ESP32, ESP32-S and ESP32-C series SoC.
The radio co-processor (RCP), which is an ESP32-H series SoC. The RCP enables the Border Router to access the 802.15.4 physical and MAC layer.
[그림 4.11] ESP32 Thread Border Router [출처 - 참고문헌 9]
2개의 SoC 간은 아래 그림 처럼, 다양한 h/w interface를 통해 연결되어 있다.
- UART and SPI for serial communication
- RESET and BOOT pins for RCP Update
- 3-Wires PTA for RF coexistence
[그림 4.12] ESP32 Thread Border Router 2개의 SoC간 통신 Interface[출처 - 참고문헌 10]
📌 Firmware build를 시도해 보면 자연히 알게 되겠지만, 2개의 SoC가 있기 때문에 관련 firmware도 총 2개가 필요(최종 결과물은 2개를 하나로 묶어서 출력하게됨)하다. 단, 설치는 main SoC(ESP32-S3) -> UART -> ESP32-H2 형태로 알아서 진행되게 된다.
<esp-idf 환경 구축하기>
$ git clone -b v5.1.2 --recursive https://github.com/espressif/esp-idf.git
$ cd esp-idf/
$ ./install.sh
$ . ./export.sh
$ cd ..
<Thread Border Router firmware build 하기>
$ git clone -b v1.0 --recursive https://github.com/espressif/esp-thread-br.git
$ cd esp-thread-br/examples/basic_thread_border_router
$ idf.py menuconfig
-> 아래 page의 내용을 참조하여 menuconfig 설정을 한다(설정 사항이 너무 많이 link로 대신함).
$ cd ..
$ cd esp-idf/
$ cd examples/openthread/ot_rcp/
$ idf.py set-target esp32h2
$ idf.py build
-> 여기서 만든 image는 esp32s3 soc image를 설치하면서 자동으로 UART를 통해 esp32h2 soc에 전달된다.
$ cd ..
$ cd esp-thread-br/
$ cd examples/
$ cd basic_thread_border_router/
$ idf.py set-target esp32s3
$ idf.py build
-> esp32s3 soc용 firmware image를 build 한다.
OK, 여기까지 정상적으로 build가 진행되었다. 이제 flash writing을 해 보도록 하자.
$ idf.py -p /dev/ttyUSB1 flash monitor
이상으로 GL-S20 thread border router를 (다소 빠른 속도로) 살펴 보았다.
5. 아직 못다한 이야기
지금까지 Gl-iNet 사에서 판매하는 Thread 관련 3개의 제품 즉, GL-S200, GL-S20, Thread Dev Board의 주요 특징을 간략히 살펴 보았다. 늘 그렇지만 정리를 하다 보면, 아쉬운 점이 항상 남게 되는데, 앞으로 해야 할 일을 정리하는 것으로 이번 posting을 마무리하고자 한다. 🏁
1) OpenThread source code에 대한 면밀한 분석이 필요해 보인다.
2) Thread 기능 설정 관련하여 추가 테스트가 필요해 보인다.
3) BLE sensor를 붙여 보는 실험을 하지 못했다.
4) Thread Dev Board용 Zephyr code에 대한 상세 분석이 필요하다.
5) GL-S20 ESP-IDF code에 대한 상세 분석이 필요하다.
6) 이 3개의 제품(s/w)을 가공하여 또 다른 제품 형태로 만들 수 있을지 고민해 보자.
제품을 단순히 사용해 보는 것은 크게 의미가 없으며, 각 제품을 구성하는 주요 코드의 동작 원리를 정확히 파악해 보는 것이 개발자의 자세(?)가 아닐까? ㅋㅋ 😋
Good luck~
6. References
[1] https://www.gl-inet.com/products/gl-s200/#specs
[2] https://docs.gl-inet.com/iot/en/thread_board_router/gl-s200/openthread_border_router_codelabs/
[3] s200_datasheet_EN_20230602, GL Technologies (Hong Kong) Limited.
[4] https://openthread.io
[5] https://www.threadgroup.org/Portals/0/documents/support/Thread%20Network%20Fundamentals_v3.pdf
[6] https://webthesis.biblio.polito.it/27126/1/tesi.pdf
[7] https://docs.gl-inet.com/iot/en/thread_board_router/gl-s20/user_manual/web_admin_panel_guide/
[8] Analysis of DTLS Implementations Using Protocol State Fuzzing, Paul Fiterau-Brostean
[9] https://www.espressif.com/en/news/Thread_Border_Router_Certification
[10] https://dl.espressif.com/dl/schematics/esp_thread_br_zigbee_gw_sub_ethernet_schematiccs_v1.0.pdf
[11] https://velog.io/@gs0351/CoAPConstrained-Application-Protocol
[12] https://www.devicemart.co.kr/goods/view?no=1360841&srsltid=AfmBOopMYhHHctSmebkqCsFrnyQIV4qp0h87Yfs1nBU5dAeDcBaODbJb
[13] https://docs.nordicsemi.com/bundle/ug_nrf_cltools/page/UG/cltools/nrf_nrfjprogexe.html
[14] And, Google~
Slowboot